如仍未解决,请联系客服!
开发者中心
我们将汇总与开发相关的常见问题,供开发者参考!
Q: ubuntu环境安装好SDK后插上模组运行报错,报 Libusb failed to open device: LIBUSB ERROR ACCESS (-3)
A: 安装好sdk后需要安装官网的文档安装usb权限

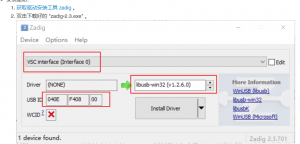
Q:windows 安装完SDK后使用viewer测试发现没有RGB和TOF的图像
A: windows 需要安装USB的驱动,usb的驱动下载需要到官网下载。
Q:SDK和驱动都安装好后插上模组还是不能工作?
A: 如果是全功能的模组 TOF对功耗的要求比较高,峰值的电流是3A,所以需要用额外供电的hub才可以。
Q:TOF怎么保存点云的PCD文件,然后用工具恢复点云?
A: 使用viewer可以保存点云PCD文件和深度图,然后用cloudcompare恢复就可以看到点云的效果。
Q: TOF支持的分辨率和精度
A: TOF的分辨率是640*480,双频支持的最大距离(室内)7米,精度是1%。
Q: 用viewer打开后发现6dof数据不更新,但是欧拉角是更新的?
A: slam的工作原理是需要环境中有特征点,如果在测试过程中没有特征点那么slam就会lost,这个事情 XYZ 就会停止更新,但是由于IMU是工作的所以欧拉角是更新的。
Q: ROS安装好后,用RVIZ看发现没有RGB和TOF的节点
A: 在代码中我们默认把RGB和TOF相关的宏关闭了,可以根据自己的需要去自行打开。
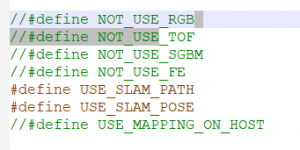
Q:用ROS测试发现TOF的点云效果不理想?
A: TOF相关的参数是可以做设置的,代码默认用的是QVGA,单频模式,可以通过API做设置。具体如下:
![]()
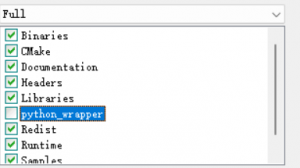
Q: 官网的文档显示支持python为啥安装sdk后还是没有python?
A:支持的,windows安装sdk的时候需要选择python。
Q:可以同时使用多个模组吗?
A:可以的,默认的SDK不支持,如果需要这个功能需要单独的发送SDK。
Q:是否支持RGB和TOF pixel对齐的功能?
A:支持,我们有RGBD的功能,调用API后可以获取RGBD的图像。
Q:Cslam是什么功能?
A: Cslam 中的cslam 的 c 是 constrained 受限; 约束。这个功能和slam的区别是需要先建一个地图,然后会把地图保存在设备中,下次使用的时候需要先把地图加载进来,这样对测试的重复精度有很大的提高。
Q: cslam建图后如果环境变了影响精度吗?
A:如果测试的环境和建图的环境差别不是很大是没有影响的。如果完全变了会影响精度。